In a Caltech lab late last year, researchers showed a new kind of rescue robot team: not a single do‑everything machine, but a pair that shares the load.
The system, called X1, combines a walking humanoid with a small robot that can fly or drive. The goal is to check risky, messy places before people step in.
From demo to concept
X1 grew out of a three‑year partnership between the California Institute of Technology and Abu Dhabi’s Technology Innovation Institute (TII).
Aaron Ames, a mechanical engineer who directs Caltech’s Center for Autonomous Systems and Technologies (CAST), has focused on getting robots to walk reliably when the ground is uneven and the plan changes.
Mory Gharib helped shape the bigger idea: treat several machines as one system, with each member doing what it does best.
That mindset matters in emergencies.
Wheels love smooth floors but lose to stairs. Drones see over obstacles but burn power to stay up. Humanoids can step over clutter, yet they cannot be everywhere at once.
X1 bets that coordination beats compromise.
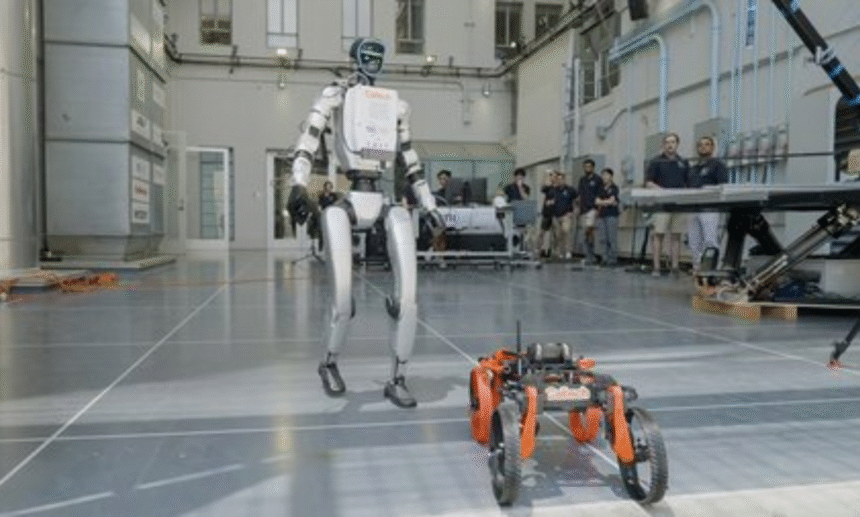
The Caltech demonstration was staged like a compact rescue rehearsal. The humanoid began inside a lab, moved through hallways and doorways, and climbed a set of stairs before heading outdoors toward an elevated area near Caltech Hall.
Then it paused, bent forward, and the second robot launched from its back. The handoff was clean and quick, as if the walker had simply carried the scout to the edge of the next problem.
Inside the X1 system
The “carrier” is a modified Unitree G1 humanoid. In practice, its job is not to perform humanlike gestures but to cover distance, keep balance, and transport equipment across mixed indoor and outdoor spaces.
A strong back and stable steps turn it into a mobile base that can bring sensors to places with poor access for vehicles.
Riding on that base is M4, a morphing robot that changes shape to match the moment.
It can take off as a drone, land and switch into a wheeled rover, and crouch for stability in tight spots.
Collaborators in Boston, including teams linked to Northeastern University, helped design the transformation hardware for durability.
In the team’s recent research report on M4’s autonomy, the robot is described as carrying cameras, a laser ranging sensor (LiDAR), and additional range finders.
Together, these help it locate itself and move through cluttered environments without a joystick.
In the demo sequence, M4 lifted off, landed, switched to wheels, drove toward a pond, and later flew again—showing that the same platform can handle both ground-level inspection and aerial overview.
A key theme in the studies is “locomotion plasticity,” meaning the ability to switch travel modes based on terrain. Instead of forcing one machine to excel everywhere, M4 trades modes the way a person might alternate between walking and climbing.
For the control side, the researchers contrast their approach with many humanoids that rely heavily on prerecorded motions.
X1’s development blends physics-based modeling with machine learning so the robots can adjust in real time when surfaces, slopes, or spacing are not exactly as expected.
This division of labor also targets energy use. The humanoid handles longer, steady travel on foot, while M4 saves its short bursts of flying or driving for when they add real value—quick peeks, tight turns, or fast repositioning.
Limits, safety, and the road ahead
For now, X1 is still closer to a promising prototype than a field-ready responder. The system can run scripted missions, but unpredictable conditions—dust, wind, broken surfaces, confusing reflections—are the hard test for any robot that must act without constant supervision.
That is why ongoing work is aimed at safety-critical control: preventing unsafe moves when sensors get noisy or fail, and making decisions that can be reviewed.
Researchers also emphasize practical safeguards, including long-duration testing without crashes, transparent behavior, and a human override such as an emergency stop.
TII’s role extends beyond hardware; it supports secure onboard computing and flight-control systems so the robots can keep functioning even if network links drop or remote control is unavailable.
If that reliability can be proven, the potential applications are broad: scouting damaged buildings after earthquakes or floods, mapping blocked corridors, and delivering supplies into hazardous zones.
The long-term vision is a team that can decide, on its own, when to walk, drive, or fly—and do it as calmly as it did on the Caltech stairs.


